vol. 3 6/2014 Inżynier i Fizyk Medyczny
328
robotyka
\
robotics
artykuł
\
article
końcówki chwytne służące głównie do przytrzymywania różnych
elementów (np. narządów sąsiadujących z polem operacji albo
krwawiących tętnic przeciętych w trakcie zabiegu).
Schemat całości systemu robota
chirurgicznego oraz jego otoczenia
W przedstawionych wyżej rozdziałach skupiano uwagę kolejno
na elementach składowych typowego robota chirurgicznego,
przyjmując za podstawę rozważań budowę najpopularniejszego
obecnie i zapewne najlepszego z aktualnie dostępnych robota
chirurgicznego da Vinci firmy
Intuitive Surgical.
Na rysunku 14
przedstawiono całość systemu, jaki stanowi robot chirurgiczny
oraz posługujący się nim ludzie.
Bibliografia
1.
M. Anvari:
Remote telepresence surgery. the Canadian experience
,
Surg. Endosc., 21(4), 2007, 537-541.
2.
Y.S. Kwoh, J. Hou, E.A. Jonckheere, S. Hayall:
A robot with im-
proved absolute positioning accuracy for CT guided stereotactic
brain surgery
, IEEE Trans. Biomed. Engng, February 35(2), 1988,
153-161.
3.
J. Marescaux, J. Leroy, F. Rubino et al.:
Transcontinental robot-
-assisted remote telesurgery: feasibility and potential applications
,
Ann Surg., 235(4), 2002, 487-492.
4.
L. Podsędkowski:
Roboty medyczne – budowa i zastosowanie,
WNT, Warszawa 2010.
5.
J. Pransky:
ROBODOC – surgical robot success story
, Industrial
Robot, 24, 1997, 231-233.
6.
N. Suzuki, A. Hattori, S. Ieiti, K. Konishi, T. Maeda, Y. Fujono,
Y. Ueda, P. Navicharern, K. Tanoue, M. Hashizume:
Tele-Control of
an Endoscopic Surgical Robot Systembetween Japan and Thailand for
Tele-NOTES
, Medicine Meets Virtual Reality. 17, IOS Press, 2009.
7.
C.W. Burckhart, P. Flury, D. Glauser:
Stereotactic Brain Surgery
,
IEEE Engineering in Medicine and Biology Magazine, 14(3),
1995, 314-317.
8.
K. Cleary, C. Nguyen:
State of the Art in Surgical Robotics: Clinical
Applications and Technology Challenges
, Computer Aided Surge-
ry., 6, 2001, 312-328.
9.
M.P. Esposito, P. Ilbeigi, M. Ahmed, V. Lanteri:
Use of fourth arm
in da Vinci robot-assisted extraperitoneal laparoscopic prostatecto-
my: novel technique
, Urology, 66, 2005, 649-652.
10.
C.G. Rogers, R. Laungani, A. Bhandari, L.S. Krane, D. Eun, M.N. Pa-
tel, R. Boris, A. Shrivastava, M. Menon:
Maximizing console surgeon
independence during robot-assisted renal surgery by using the Fourth
Arm and TilePro
, J Endourol., 23, 2009, 115-121.
Rys. 14
. Schemat całości systemu da Vinci
Źródło:
/ instruments/OR_Se-
tup_General_300.jpg, dostęp: wrzesień 2014.
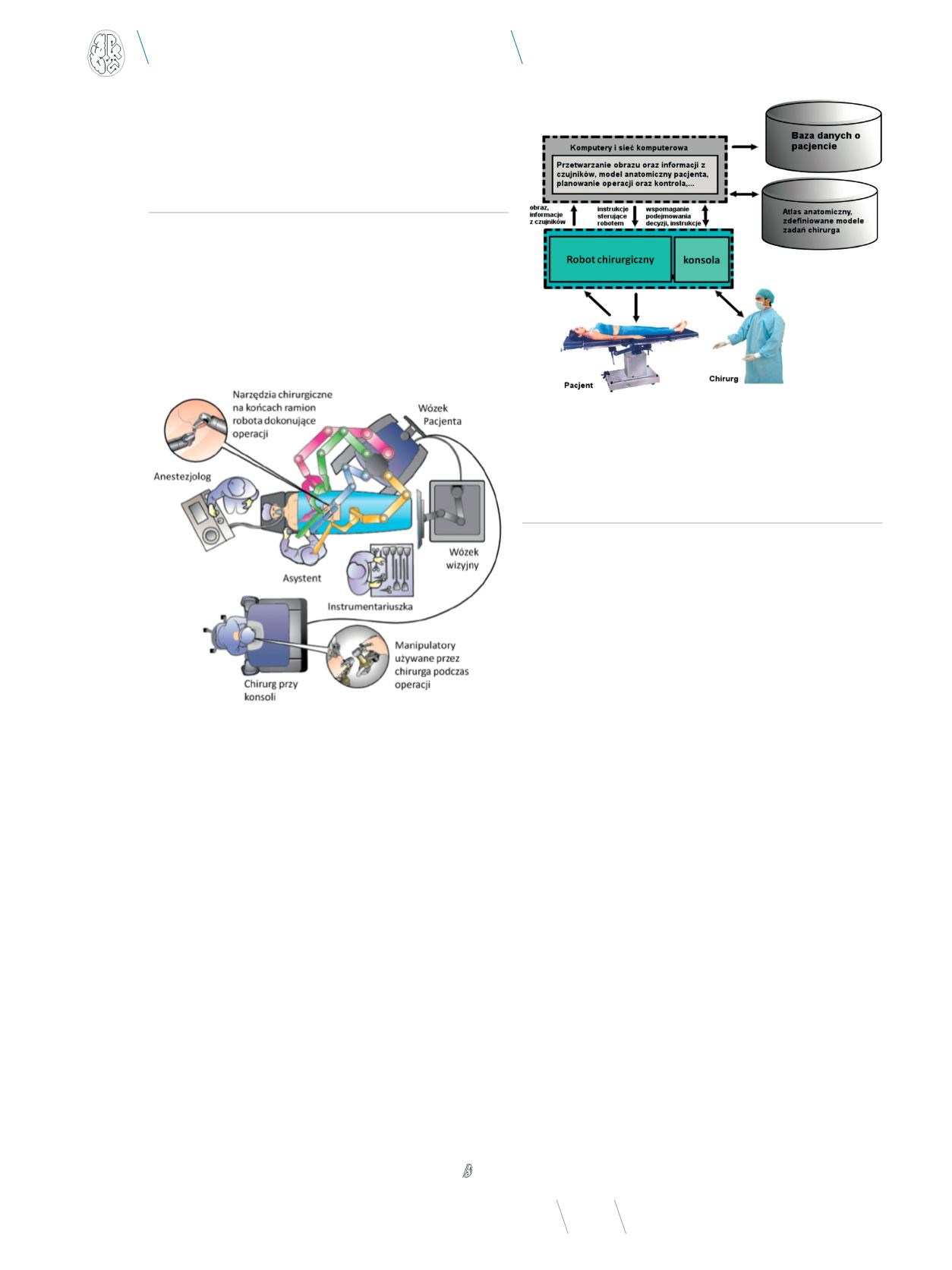
Skoro już odwołaliśmy się do systemowego podejścia, to
warto także odnotować fakt, że robot chirurgiczny może być
częścią złożonego systemu (Rys. 15), w którym odpowiednie
wspomaganie komputerowe może towarzyszyć procesowi
planowania zabiegu, wspomagania procesu jego prowadzenia
przez dostarczanie na bieżąco na przykład danych obrazowych
na temat operowanego narządu pochodzących z etapu badań
diagnostycznych pacjenta (komunikacja za pomocą sieci kompu-
terowej z systemami PACS i RIS szpitala) oraz ewentualnie także
danych z atlasów anatomicznych i podręczników.
Roboty chirurgiczne są nie tylko sprawnymi i wygodnymi na-
rzędziami, polepszającymi warunki pracy lekarza oraz komfort
pacjenta po operacji. Są także krokiem w kierunku tworzenia
nowego paradygmatu medycyny: leczenia przy wykorzystaniu
skojarzonego działania ludzi i zaawansowanej nowoczesnej tech-
niki. Droga do pełnej symbiozy medycyny z techniką jest jeszcze
daleka i są na tej drodze liczne przeszkody. Jednak nawet najdłuż-
sza droga zaczyna się od pierwszego kroku, a budowę robotów
chirurgicznych oraz ich coraz szersze stosowanie w medycynie
można zdecydowanie uznać za ten ważny pierwszy krok.
Rys. 15
. Rola innych systemów komputerowych w powiązaniu ze zrobotyzowanym
stanowiskiem chirurgicznym
Źródło: L. Podsędkowski: Roboty medyczne – budowa i zastosowanie (zmodyfiko-
wany przez Autora).


